
Relative standard devition of repeatability
Repeatability describes the property that the output signal is the same for all measurements of the same torque when measured several times. During the measurements the mounting position of the torque transducer shall remain unchanged and the torque transducer shall not be mounted and
dismounted (repeat conditions). The standard deviation indicates the average deviation between all measurements of the same torque when measured several times.
The relative standard deviation of repeatability is a measure of the repeatability according toDIN 1319. It is defined as the standard deviation of repeatability according to DIN 1319 and is expressed as a percentage of the range of the signal span covered during the testing procedure. It is a statistic measure of
random measurement deviations. For this reason, all those conditions are kept constantthat, if changed, might cause variations in systematic measurement deviations (repeat conditions to DIN 1319).
The determination of the relative standard deviation of repeatability is a type test carried out on a static calibration system as follows:
- The torque transducer is preloaded up to nominal torque. The measurement signalS1,100% is taken at nominal torque
- The load is reduced to 50 % of the nominal load. The measurement signal S1,50% is taken at half the nominal torque
- Alternation between 50 % and 100 % of nominal torque. The measurement signalsSi,50% and Si,100% are taken until 10 measured values each are available for each torque
- The equation below is used to calculate the relative standard deviation (in mathematical terminology, the empirical standard deviation of a random sample) for each torque and relate it to the output signal span:
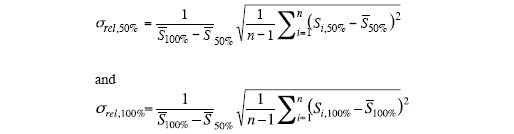
with n=10 being the number of measurements for the respective torque applied (50 % or 100 %) and the arithmetic mean of the measurement signals according to

- The technical data specifies the inferior of the two values σrel,50% and σrel,100% .
Example:
HBM specifies the standard deviation of repeatability for its T10F torque transducer as σrel ≤ 0.03%. This value refers to the output signal span between the values of applied torque. Assuming a nominal torque of 1 kN·m, for example, this corresponds to a span of 500 N·m according to the test conditions specified above. Thus the standard deviation of repeatability in this case amounts to ≤ 0.15 N·m.
In the following example repeatability (quantitatively specified by the standard deviation of repeatability σrel) is of special importance to the user. A test bench for combustion enginesis used for measurements with the aim of comparing different settings of the engine’s control electronics. The torque transducer’s mounting and the ambient conditions remain unchanged. The loading histories for the different measurement series are identical. In these measurements the differences between the torque values of the individual test series are more important than the absolute torque values. Under these circumstances, the contribution of the torque transducer to the uncertainty of these differences is given by its repeatability.


